Considera la función 𝑓:ℝ→ℝ dada por 𝑓(𝑥)=𝑒𝑥(𝑥2−5𝑥+6).
Determina los intervalos de concavidad y de convexidad de 𝑓 y los puntos de inflexión de su gráfica.
Resolución
En primer lugar, calculamos la primera y la segunda derivada de 𝑓.𝑓′(𝑥)=𝑒𝑥(𝑥2−5𝑥+6)+𝑒𝑥(2𝑥−5)=𝑒𝑥(𝑥2−3𝑥+1),𝑓″(𝑥)=𝑒𝑥(𝑥2−3𝑥+1)+𝑒𝑥(2𝑥−3)=𝑒𝑥(𝑥2−𝑥−2).
Para hallar los candidatos a puntos de inflexión, igualamos la segunda derivada a cero.
𝑓″(𝑥)=0⇔𝑒𝑥(𝑥2−𝑥−2)=0⇔𝑥2−𝑥−2=0⇔{𝑥=−1,𝑥=2.
Estudiamos el signo de la segunda derivada.
(−∞,−1)
(−1,2)
(2,+∞)
signo de 𝑓″
+
−
+
curvatura de 𝑓
⌣
⌢
⌣
Por tanto, 𝑓 es convexa en (−∞,−1)∪(2,+∞) y cóncava en (−1,2).
Además, (−1,12𝑒) y (2,0) son puntos de inflexión.
En primer lugar, hallamos una primitiva de la función.
Para resolver esta integral, usamos las relaciones trigonométricas
{cos2(𝑥)+sen2(𝑥)=1⇔cos2(𝑥)=1−sen2(𝑥),cos(2𝑥)=cos2(𝑥)−sen2(𝑥).
Sustituyendo en la segunda identidad,
cos(2𝑥)=cos2(𝑥)−sen2(𝑥)⇔cos(2𝑥)=1−2sen2(𝑥)⇔sen2(𝑥)=1−cos(2𝑥)2.
De esta forma,
∫𝑥sen(𝑥)𝑑𝑥=∫𝑥1−cos(2𝑥)2𝑑𝑥=12∫𝑥𝑑𝑥−12∫𝑥cos(2𝑥)𝑑𝑥=14𝑥2−12∫𝑥cos(2𝑥)𝑑𝑥.
Resolvemos la integral por partes.
𝑢=𝑥⇒𝑢′=1,𝑣′=cos(2𝑥)⇒𝑣=12sen(2𝑥).
Entonces:
14𝑥2−12∫𝑥cos(2𝑥)𝑑𝑥=14𝑥2−12(12𝑥sen(2𝑥)−12∫sen(2𝑥)𝑑𝑥)=14𝑥2−14𝑥sen(2𝑥)−18cos(2𝑥).
Por último, calculamos la integral definida.
∫𝜋0𝑥sen(𝑥)𝑑𝑥=[14𝑥2−14𝑥sen(2𝑥)−18cos(2𝑥)]𝜋0=𝜋24−18−(−18)=𝜋24.
Considera el sistema de ecuaciones dado por 𝐴𝑋=𝐵 siendo
𝐴=⎛⎜
⎜
⎜⎝1−21𝑚4−20𝑚+2−3⎞⎟
⎟
⎟⎠,𝑋=⎛⎜
⎜
⎜⎝𝑥𝑦𝑧⎞⎟
⎟
⎟⎠y𝐵=⎛⎜
⎜
⎜⎝22𝑚1⎞⎟
⎟
⎟⎠.
Discute el sistema según los valores de 𝑚.
Para 𝑚=−2, ¿existe alguna solución con 𝑧=0?
En caso afirmativo, calcúlala.
En caso negativo, justifica la respuesta.
Resolución
En primer lugar, observamos que:
∣110−3∣=−3≠0⇒rang(𝐴)≥2.
Para determinar el rango de 𝐴 en función del valor de 𝑚, estudiamos su determinante.
|𝐴|=∣1−21𝑚4−20𝑚+2−3∣=−12+𝑚2+2𝑚−6𝑚+2𝑚+4=𝑚2−2𝑚−8.
Observamos que:
|𝐴|=0⇔𝑚2−2𝑚−8=0⇔{𝑚=−2,𝑚=4.
Si 𝑚≠−2 y 𝑚≠4, entonces rang(𝐴)=3.
Como el rango de la matriz de coeficientes es máximo, el sistema es compatible determinado.
Si 𝑚=−2, entonces rang(𝐴)=2.
La matriz de coeficientes ampliada es:
𝐴∗=⎛⎜
⎜
⎜
⎜⎝1−212−24−2−400−31⎞⎟
⎟
⎟
⎟⎠.
Observamos que las dos primeras filas son proporcionales, así que rang(𝐴∗)=2.
Como rang(𝐴)=rang(𝐴∗)=2<3, el sistema es compatible indeterminado.
Si 𝑚=4, entonces rang(𝐴)=2.
La matriz de coeficientes ampliada es:
𝐴∗=⎛⎜
⎜
⎜
⎜⎝1−21244−2806−31⎞⎟
⎟
⎟
⎟⎠.
Observamos que:
∣1124−280−31∣=−6≠0⇒rang(𝐴∗)=3.
Como rang(𝐴)≠rang(𝐴∗), el sistema es incompatible.
Si 𝑚=−2, el sistema es compatible indeterminado por el apartado anterior.
Podemos reducir el sistema a:
{𝑥−2𝑦+𝑧=2,−3𝑧=1.
Si tomamos 𝑦=𝜆, entonces:
−3𝑧=1⇔𝑧=−13,𝑥−2𝑦+𝑧=2⇔𝑥=2+2𝑦−𝑧𝑦=𝜆←←←←←←←←←←←→𝑧=−1/3𝑥=73+2𝜆.
Por tanto, las soluciones del sistema son de la forma:
⎧{
{⎨{
{⎩𝑥=73+2𝜆,𝑦=𝜆,𝑧=−13,𝜆∈ℝ.
Observamos que no existe ninguna solución con 𝑧=0.
Considera el plano 𝜋≡𝑥−𝑦+𝑎𝑧=0 y la recta
𝑟≡{4𝑥−3𝑦+4𝑧=1,3𝑥−2𝑦+𝑧=0.
Halla 𝑎 sabiendo que 𝜋 es paralelo a 𝑟.
Determina el plano perpendicular a 𝑟 que pasa por el punto 𝑃(1,2,3).
Resolución
En primer lugar, hallamos el vector director de la recta 𝑟.⃗𝑑𝑟=(4,−3,4)×(3,−2,1)=∣⃗𝑥⃗𝑦⃗𝑧4−343−21∣=(5,8,1).
Además, el vector normal de 𝜋 es ⃗𝑛𝜋=(1,−1,𝑎).
Como 𝜋 es paralelo a 𝑟, ha de verificarse que:
⃗𝑑𝑟⋅⃗𝑛𝜋=0⇔5−8+𝑎=0⇔𝑎=3.
Llamamos 𝜏 al plano que nos piden.
Como 𝜏 es perpendicular a 𝑟, ⃗𝑛𝜏=⃗𝑑𝑟=(5,8,1).
Además, el punto 𝑃(1,2,3) pertenece al plano.
Por tanto, la ecuación del plano 𝜏 es:
𝜏≡5(𝑥−1)+8(𝑦−2)+𝑧−3=0⇔5𝑥+8𝑦+𝑧−24=0.
Sea la función derivable 𝑓:ℝ→ℝ definida por
𝑓(𝑥)={𝑒2𝑎𝑥−4𝑏,si𝑥<1,1−𝑥ln(𝑥),si𝑥≥1.
Determina los valores de 𝑎 y 𝑏.
Halla la ecuación de la recta tangente a la gráfica de 𝑓 en el punto de abscisa 𝑥=2.
Resolución
Si 𝑥≠1, 𝑓 es continua y derivable para cualquier valor de 𝑎 y 𝑏 con:
𝑓′(𝑥)={2𝑎𝑒2𝑎𝑥−4𝑏,si𝑥<1,−ln(𝑥)−1,si𝑥>1.
Estudiamos la continuidad y la derivabilidad en el punto de ruptura 𝑥=1.
Estudiamos la continuidad.
lím𝑥→1−𝑓(𝑥)=lím𝑥→1−𝑒2𝑎𝑥−4𝑏=𝑒2𝑎−4𝑏,lím𝑥→1+𝑓(𝑥)=lím𝑥→1+(1−𝑥ln(𝑥))=1,𝑓(1)=1.
Para que 𝑓 sea continua, ha de verificarse que:
lím𝑥→1−𝑓(𝑥)=lím𝑥→1+𝑓(𝑥)=𝑓(1)⇔𝑒2𝑎−4𝑏=1⇔2𝑎−4𝑏=0⇔𝑎=2𝑏.
Estudiamos la derivabilidad.
𝑓′−(1)=lím𝑥→1−𝑓′(𝑥)=lím𝑥→1−2𝑎𝑒2𝑎𝑥−4𝑏=2𝑎𝑒2𝑎−4𝑏,𝑓′+(1)=lím𝑥→1+𝑓′(𝑥)=lím𝑥→1+(−ln(𝑥)−1)=−1.
Para que 𝑓 sea derivable, ha de verificarse que:
𝑓′−(1)=𝑓′+(1)⇔2𝑎𝑒2𝑎−4𝑏=−1.
Con estas dos condiciones, planteamos el sistema de ecuaciones:
{𝑎=2𝑏,2𝑎𝑒2𝑎−4𝑏=−1.
Sustituyendo en la segunda ecuación,
4𝑏=−1⇔𝑏=−14⇒𝑎=−12.
Por tanto, 𝑎=−12 y 𝑏=−14.
La ecuación de la recta tangente en 𝑥=2 viene dada por:
𝑦−𝑓(2)=𝑓′(2)(𝑥−2)⇔𝑦−1+2ln(2)=(−ln(2)−1)(𝑥−2)⇔⇔𝑦=−(ln(2)+1)𝑥+2ln(2)+2−2ln(2)+1⇔𝑦=−(ln(2)+1)𝑥+3.
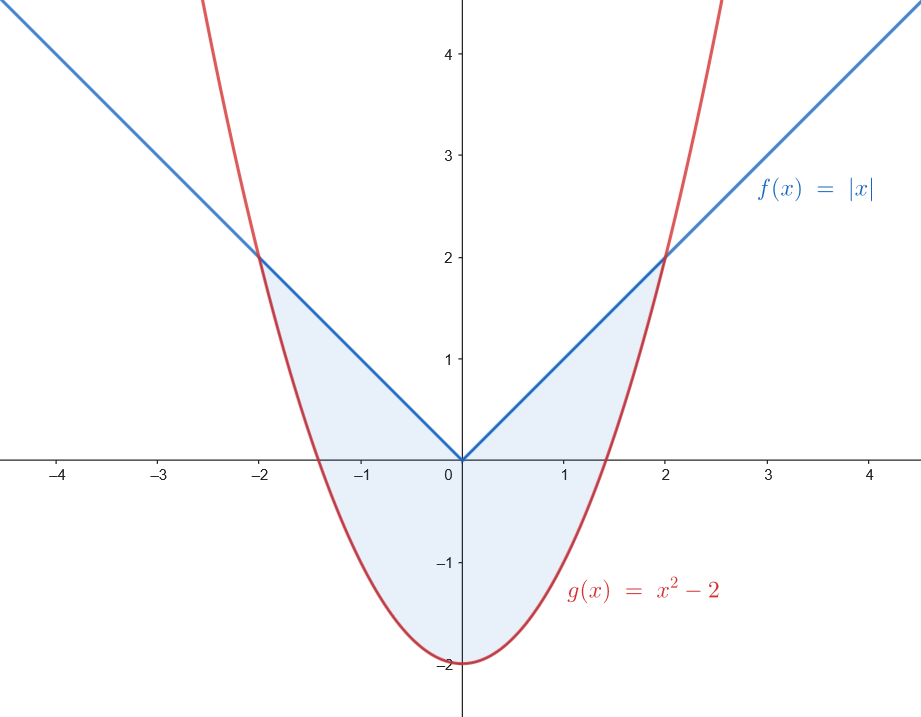
Considera las funciones 𝑓,𝑔:ℝ→ℝ definidas por 𝑓(𝑥)=|𝑥| y 𝑔(𝑥)=𝑥2−2.
Calcula los puntos de corte de las gráficas de 𝑓 y 𝑔.
Esboza el recinto que determinan.
Determina el área del recinto anterior.
Resolución
Hallamos los puntos de corte de las dos funciones.
𝑓(𝑥)=𝑔(𝑥)⇔|𝑥|=𝑥2−2⇔⎧{
{
{⎨{
{
{⎩𝑥=𝑥2−2⇔𝑥2−𝑥−2=0⇔{𝑥=−1(noválida),𝑥=2,−𝑥=𝑥2−2⇔𝑥2+𝑥−2=0⇔{𝑥=−2,𝑥=1(noválida).
Por tanto, los puntos de corte son (−2,2) y (2,2).
Representamos el recinto delimitado por ambas funciones.
Como el recinto es simétrico, podemos calcular el área como:
2∫20(𝑓(𝑥)−𝑔(𝑥))𝑑𝑥=2∫20(𝑥−(𝑥2−2))𝑑𝑥=2∫20(−𝑥2+𝑥+2)𝑑𝑥=2[−13𝑥3+12𝑥2+2𝑥]20==2(−83+2+4)=203𝑢2.
Halla los valores de 𝜆 tales que |𝐴−𝜆𝐼|=0, donde 𝐼 es la matriz identidad de orden 3.
Para 𝜆=1, resuelve el sistema dado por (𝐴−𝜆𝐼)𝑋=0.
¿Existe alguna solución tal que 𝑧=1?
En caso afirmativo, calcúlala.
En caso negativo, justifica la respuesta.
Resolución
En primer lugar, hallamos la matriz 𝐴−𝜆𝐼.𝐴−𝜆𝐼=⎛⎜
⎜
⎜⎝123002011⎞⎟
⎟
⎟⎠−⎛⎜
⎜
⎜⎝𝜆000𝜆000𝜆⎞⎟
⎟
⎟⎠=⎛⎜
⎜
⎜⎝1−𝜆230−𝜆2011−𝜆⎞⎟
⎟
⎟⎠.
Calculamos su determinante.
|𝐴−𝜆𝐼|=∣1−𝜆230−𝜆2011−𝜆∣=−𝜆(1−𝜆)−2(1−𝜆)=−(𝜆+2)(1−𝜆).
Observamos que:
|𝐴−𝜆𝐼|=0⇔−(𝜆+2)(1−𝜆)=0⇔{𝜆=−2,𝜆=1.
Si 𝜆=1, la matriz 𝐴−𝜆𝐼 es:
𝐴−𝐼=⎛⎜
⎜
⎜⎝0230−12010⎞⎟
⎟
⎟⎠.
Sabemos que rang(𝐴−𝐼)≤2 por el apartado anterior.
Además, observamos que:
∣−1210∣=−2≠0⇒rang(𝐴−𝐼)=2.
Como se trata de un sistema homogéneo, es compatible indeterminado.
Podemos reducir el sistema a:
{−𝑦+2𝑧=0,𝑦=0.
Despejando y sustituyendo, obtenemos que:
−𝑦+2𝑧=0⇔𝑧=𝑦2𝑦=0←←←←←←→𝑧=0.
Si tomamos 𝑥=𝜇, las soluciones del sistema son de la forma:
⎧{
{⎨{
{⎩𝑥=𝜇,𝑦=0,𝑧=0,𝜇∈ℝ.
Observamos que no existe ninguna solución con 𝑧=1.
Considera el plano 𝜋≡𝑥−𝑦+𝑧=2 y la recta
𝑟≡𝑥2=𝑦+11=𝑧+2−1.
Calcula la distancia entre 𝑟 y 𝜋.
Halla la ecuación general del plano perpendicular a 𝜋 que contiene a 𝑟.
Resolución
El vector normal del plano es ⃗𝑛𝜋=(1,−1,1) y el vector director de la recta es ⃗𝑑𝑟=(2,1,−1).
En primer lugar, observamos que:
⃗𝑛𝜋⋅⃗𝑑𝑟=(1,−1,1)⋅(2,1,−1)=0⇒𝜋∥𝑟.
Como 𝑃(0,−1,−2) es un punto de 𝑟, la distancia se puede calcular como:
dist(𝑟,𝜋)=dist(𝑃,𝜋)=|1−2−2||⃗𝑛𝜋|=3√3=√3𝑢.
Llamamos 𝜏 al plano que nos piden.
Como 𝜏 es perpendicular a 𝜋 y contiene a 𝑟, entonces ⃗𝑛𝜋 y ⃗𝑑𝑟 son vectores directores del plano 𝜏.
Así que el vector normal de 𝜏 viene dado por:
⃗𝑛𝜏=⃗𝑛𝜋×⃗𝑑𝑟=∣⃗𝑥⃗𝑦⃗𝑧1−1121−1∣=(0,3,3).
Además, el punto 𝑃(0,−1,−2) pertenece a 𝜏 por ser un punto de 𝑟.
Por tanto, la ecuación del plano 𝜏 es:
𝜏≡3(𝑦+1)+3(𝑧+2)=0⇔3𝑦+3𝑧+9=0⇔𝑥+𝑧+3=0.