Ejercicio 1
Sea la función
- Calcula los intervalos de crecimiento y de decrecimiento de
𝑓 . - Determina los intervalos de concavidad y de convexidad de
𝑓
Resolución
-
En primer lugar, hallamos la derivada de la función
𝑓 . 𝑓 ′ ( 𝑥 ) = 2 𝑥 𝑒 𝑥 + ( 𝑥 2 + 1 ) 𝑒 𝑥 = ( 𝑥 2 + 2 𝑥 + 1 ) 𝑒 𝑥 = ( 𝑥 + 1 ) 2 𝑒 𝑥 . 𝑓 𝑓 ′ ( 𝑥 ) = 0 ⇔ ( 𝑥 + 1 ) 2 𝑒 𝑥 = 0 ⇔ ( 𝑥 + 1 ) 2 = 0 ⇔ 𝑥 + 1 = 0 ⇔ 𝑥 = − 1 . 𝑓 ′ ( 𝑥 ) > 0 𝑥 𝑓 ℝ . -
En primer lugar, hallamos la segunda derivada de la función
𝑓 . 𝑓 ″ ( 𝑥 ) = 2 ( 𝑥 + 1 ) 𝑒 𝑥 + ( 𝑥 + 1 ) 2 𝑒 𝑥 = ( 2 𝑥 + 2 ) 𝑒 𝑥 + ( 𝑥 2 + 2 𝑥 + 1 ) 𝑒 𝑥 = ( 𝑥 2 + 4 𝑥 + 3 ) 𝑒 𝑥 . 𝑓 𝑓 ″ ( 𝑥 ) = 0 ⇔ ( 𝑥 2 + 4 𝑥 + 3 ) 𝑒 𝑥 = 0 ⇔ 𝑥 2 + 4 𝑥 + 3 = 0 ⇔ { 𝑥 = − 3 , 𝑥 = − 1 . Por tanto,( − ∞ , − 3 ) ( − 3 , − 1 ) ( − 1 , + ∞ ) signo de 𝑓 ″ + − + curvatura de 𝑓 ⌣ ⌢ ⌣ 𝑓 ( − ∞ , − 3 ) ∪ ( − 1 , + ∞ ) ( − 3 , − 1 ) . ( − 3 , 1 0 𝑒 − 3 ) ( − 1 , 2 𝑒 − 1 )
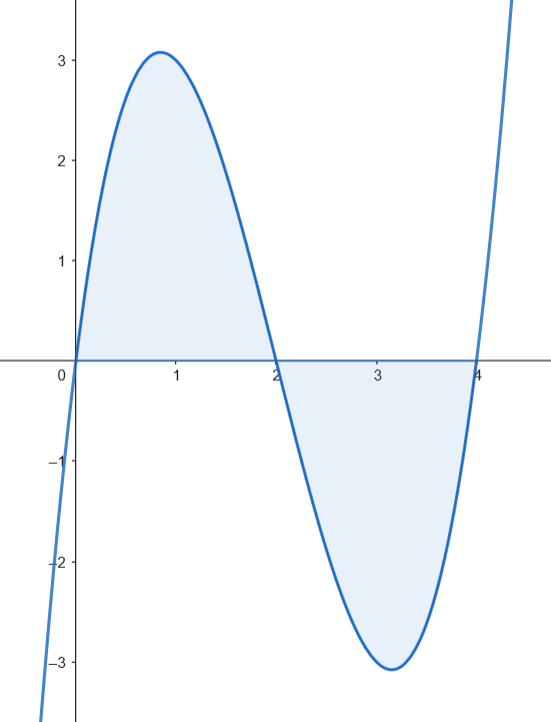 Calculamos el área de los recintos.
Calculamos el área de los recintos.